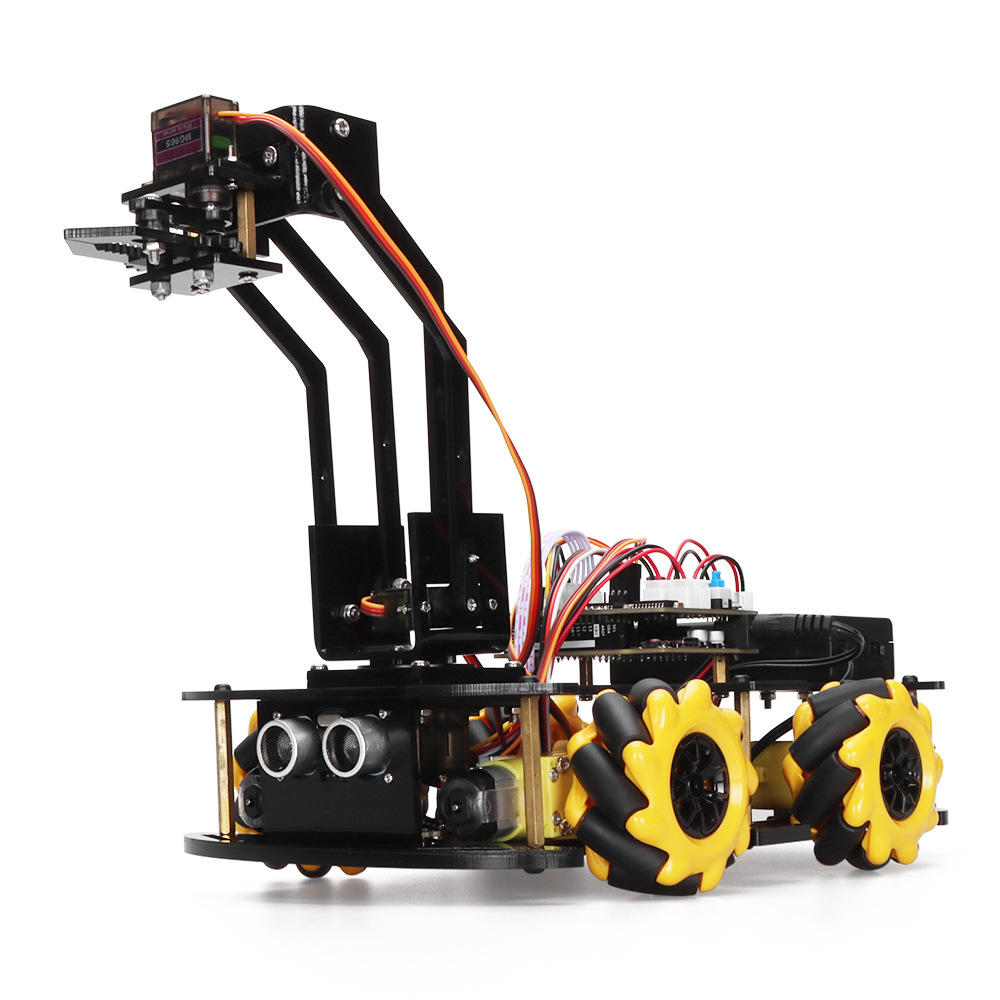

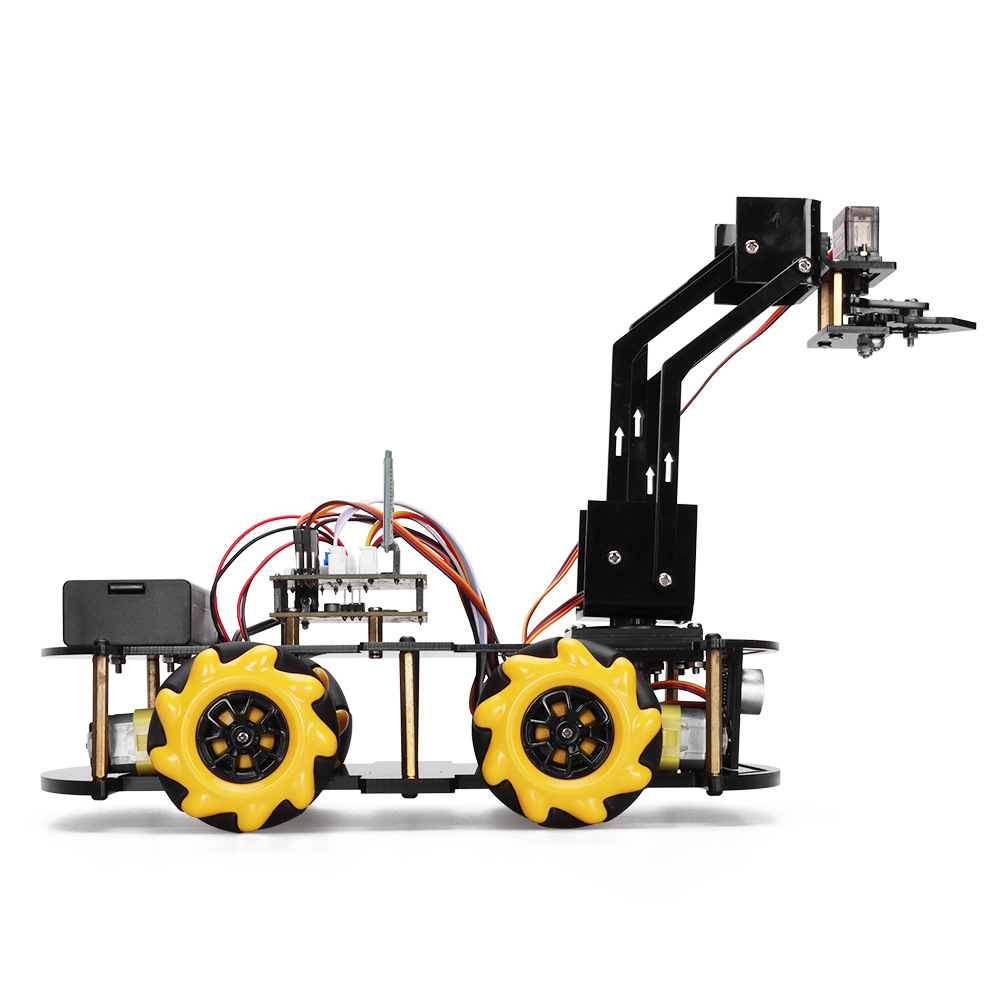
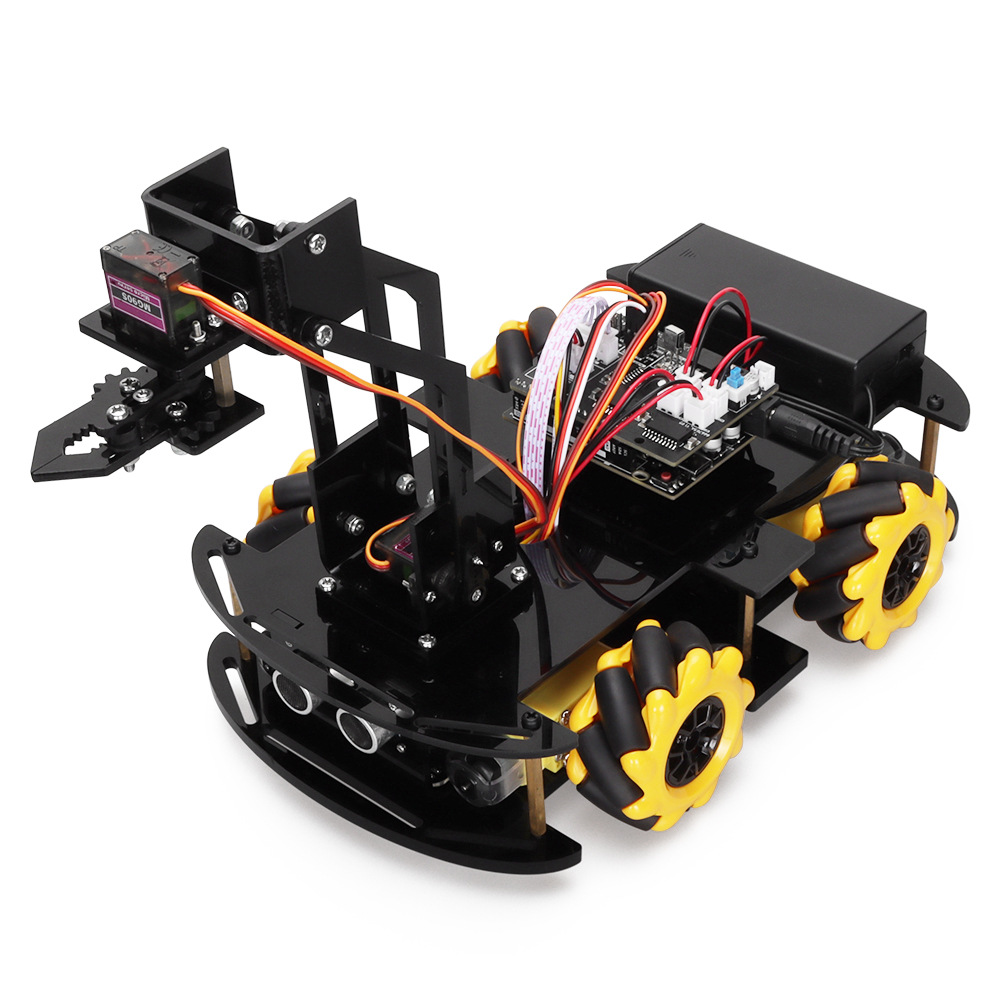
Kit de coche para evitar obstáculos con brazo robótico con rueda Mecanum y Bluetooth
Modelo: YZQ-CK012
Características:
1. Voltaje de funcionamiento: 5 V.
2. Voltaje de entrada: 7 V
3. Corriente máxima de salida: 2A
4. Consumo máximo de energía: 25 W (T = 75 ℃)
5. Velocidad del motor: 5 V 200 rpm/min
6. Ángulo de detección ultrasónica: < 1
7. Distancia de detección ultrasónica: 2 cm ~ 400 cm
8. Distancia del control remoto Bluetooth: 10 ~ 50 metros
9. Rango de ángulo del servomotor: 0~180°\0~360°
Modelo: YZQ-CK012
Características:
1. Voltaje de funcionamiento: 5 V.
2. Voltaje de entrada: 7 V
3. Corriente máxima de salida: 2A
4. Consumo máximo de energía: 25 W (T = 75 ℃)
5. Velocidad del motor: 5 V 200 rpm/min
6. Ángulo de detección ultrasónica: < 1
7. Distancia de detección ultrasónica: 2 cm ~ 400 cm
8. Distancia del control remoto Bluetooth: 10 ~ 50 metros
9. Rango de ángulo del servomotor: 0~180°\0~360°
Funciones del producto:
1. Multifunción: movimiento multidireccional de la rueda Mecanum, seguimiento en tres direcciones, evitación y seguimiento de obstáculos ultrasónicos, control remoto Bluetooth, control remoto por infrarrojos, agarre del brazo robótico;
2. Dificultad de montaje moderada: no es necesario soldar circuitos, conectores de terminales fáciles de instalar, con manual de montaje, montaje claro y eficiente;
3. Alta resistencia: soporte de material resistente, placa base engrosada, piezas de brazo robótico flexibles y firmes, rueda Mecanum de alta calidad
4. Alta extensión: interfaces ricas para ampliar otros sensores y módulos;
5. Programación básica: Arduino basado en código en lenguaje C;
6. Alto grado de libertad: interfaz de control remoto Bluetooth personalizada
7. Innovación inteligente: modo de automatización de la función de memoria de movimiento del brazo robótico




Valoraciones
No hay valoraciones aún.